Brushless DC motors (BLDC: Brushless Direct Current Motor), also known as electronically commutated motors (ECM or EC motors) or synchronous DC motors, are synchronous motors that use a direct current (DC) power supply. A brushless DC motor is essentially a permanent magnet synchronous motor with position feedback using a DC power input and an inverter to three-phase AC power.
There are various types of motor, but the brushless DC motor is the most ideal speed control motor available today. It combines the advantages of a DC motor with those of an AC motor, both in terms of good adjustment performance and in terms of simple structure, non-commutation spark, reliable operation and easy maintenance. As a result, it is very popular in the market and is widely used in automobiles, home appliances, industrial equipment and other fields.
01、History of brushless DC motors
Brushless DC motors are not the earliest products, but are developed on the basis of brushed motors, which are structurally more complex than brushed motors. The brushless DC motor consists of a motor body and a driver, and differs from the brushed DC motor in that the brushless DC motor does not use a mechanical brush device, but a square wave, self-controlled permanent magnet synchronous motor with a Hall sensor instead of a carbon brush commutator and a neodymium iron boron as the permanent magnet material for the rotor.
However, back in the last century when the electric motor was created, the practical motor produced was in brushless form.
The 1740s: the beginning of the invention of the electric motor
An early model of the electric motor first appeared in the 1740s through the work of Scottish Benedictine monk and scientist Andrew Gordon. Other scientists, such as Michael Faraday and Joseph Henry, continue to develop early electric motors, experimenting with electromagnetic fields and discovering how to convert electrical energy into mechanical energy.
1832: Invention of the first commutator DC motor
In 1832, the British physicist William Sturgeon invented the first DC motor that could provide enough power to drive machinery, but its application was severely limited by its low power output.
1834: The first real electric motor is built
Following in Sturgeon’s footsteps, Thomas Davenport of Vermont, USA, made history in 1834 with the invention of the first official battery-powered electric motor. It was the first electric motor with enough power to perform its task and his invention was used to power a small printing press. 1837 saw Thomas Davenport and his wife Emily Davenport receive the first patent for a DC motor.
But their motor design was still plagued by the same power and efficiency problems as William Sturgeon’s design. And unfortunately, due to the high cost of battery power involved, Thomas went bankrupt and the machine was not commercially available.
Thomas and Emily Davenport’s patented motor
1886: Invention of the practical DC motor
In 1886, the first practical DC motor that could run at constant speed at variable weight was introduced. Frank Julian Sprague was its inventor and it was this motor that provided the catalyst for the widespread use of electric motors in industrial applications.
Frank Julian Sprague’s ‘practical’ motor
It is worth noting that this practical motor was in the form of a brushless, AC squirrel-cage asynchronous motor, which not only eliminated sparks and voltage losses at both ends of the winding, but could also deliver power at a constant speed. However, the asynchronous motor had many insurmountable defects, so that motor technology developed slowly.
Shortly after the brushless motor was created, the brush DC motor was invented. Because of their simple mechanism, easy production and processing, ease of maintenance and ease of control, DC brushed motors became the mainstream of the time.
1887: The AC induction motor is patented
In 1887, Nikola Tesla invented the AC induction motor and successfully patented it a year later. It was not suitable for use in road vehicles but was later modified by engineers at Westinghouse. 1892 saw the design of the first practical induction motor, followed by a rotating bar-wound rotor, making the motor suitable for automotive applications.
1891: Development of the three-phase motor
In 1891, General Electric began developing the three-phase induction motor. To take advantage of the wound rotor design, GE and Westinghouse signed a cross-licensing agreement in 1896.
1955: Start of the brushless DC motor era
In 1955, d. harrison and others in the USA patented the first transistorised commutation circuit to replace the mechanical brushes of a brushed DC motor, officially marking the birth of the modern brushless DC motor. However, at that time there was no motor rotor position detection device and the motor had no starting capability.
1962: Invention of the first brushless DC (BLDC) motor
Thanks to advances in solid-state technology in the early 1960s, the first brushless DC (BLDC) motor was invented in 1962 by TG Wilson and PH Trickey, who called it the “DC motor with solid-state commutation”. The key element of the brushless motor was that it did not require a physical commutator, making it the most popular choice for computer disk drives, robots and aircraft.
They utilised Hall elements to detect rotor position and control the phase change of winding currents, making brushless DC motors practical, but limited by transistor capacity and relatively low motor power.
1970s to the present: rapid development of brushless DC motor applications
Since the 1970s, with the successive appearance of new power semiconductor devices (e.g. GTR, MOSFET, IGBT, IPM), the rapid development of computer control technology (microcontrollers, DSP, new control theories) and the introduction of high-performance rare earth permanent magnet materials (e.g. samarium cobalt, neodymium iron boron), brushless DC motors have developed rapidly and their capacity has increased.
Then, with the introduction of the mac classic brushless DC motor and its driver in 1978, and the development of the square wave brushless motor and sine wave brushless DC motor in the 1980s, the brushless motor really started to enter the practical stage and was developed rapidly.
02、BLDC motor basics
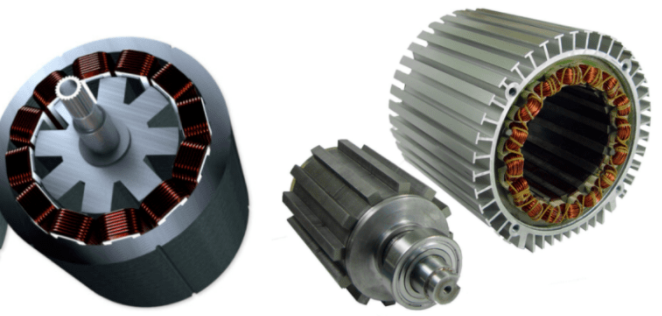
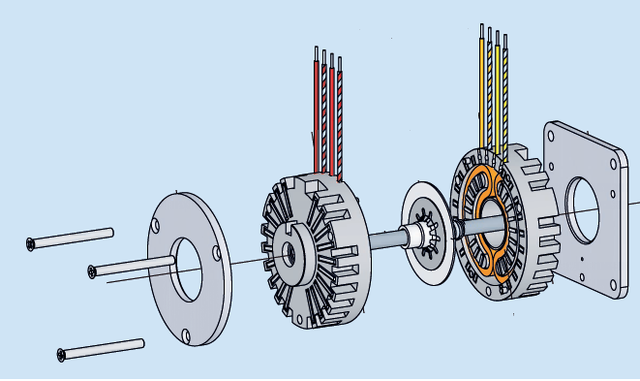
(1) The structure of brushless DC motors
A brushless DC motor consists of a rotor made of permanent magnet material, a stator with a coil winding and a position sensor (optional).
Stator
The stator structure of a BLDC motor is similar to that of an induction motor. The winding in a BLDC is slightly different from that of a conventional induction motor.
BLDC motor stator
Typically, most BLDC motors consist of three stator windings, which are connected in a star or “Y” shape (no neutral point). Alternatively, based on the coil interconnection, the stator windings are further divided into trapezoidal and sinusoidal motors.
BLDC motor counter-electromotive force
In trapezoidal motors, both the drive current and the counter-electromotive force have a trapezoidal shape (sinusoidal in the case of sinusoidal motors). Typically, motors rated at 48 V (or less) are used in automotive and robotics (hybrid cars and robot arms).
Rotor
The rotor part of a BLDC motor consists of permanent magnets (usually rare earth alloy magnets such as neodymium (Nd), samarium cobalt (SmCo) and neodymium iron boron (NdFeB)).
Depending on the application, the number of poles can vary between 2 and 8, with the north pole (N) and south pole (S) placed alternately. The diagram below shows three different arrangements of the magnetic poles.
(a): The magnets are placed on the outer circumference of the rotor.
(b): Known as an electromagnetically embedded rotor, where the rectangular permanent magnets are embedded in the core of the rotor.
(c): The magnets are inserted into the core of the rotor.
BLDC motor rotor
Position sensor (Hall sensor)
Since there are no brushes in BLDC motors, commutation is electronically controlled. In order to rotate the motor, the stator windings must be energised sequentially and the position of the rotor (i.e. the north and south poles of the rotor) must be known in order to precisely energise a specific set of stator windings.
A position sensor using a Hall sensor (which works according to the Hall effect principle) is usually used to detect the position of the rotor and convert it into an electrical signal. Most BLDC motors use three Hall sensors that are embedded in the stator to detect the position of the rotor.
The output of the Hall sensor will be either high or low, depending on whether the rotor’s north pole is near the south or north pole. By combining the results of the three sensors, the exact sequence of energisation can be determined.
(2) Working principle of brushless DC motors
As the name implies, brushless DC motors do not use brushes. Instead of using a commutator to regulate the current inside the coil, brushless DC motors use an electronic commutator to pass the current which generates the AC signal that leads to the motor drive.
Brushless DC motors operate on a similar principle to brushed DC motors. The Lorentz force law states that whenever a current-carrying conductor is placed in a magnetic field, it is subject to a force. Due to the reaction forces, the magnet will be subjected to equal and opposite forces. When a current is passed through the coil, a magnetic field is generated which is driven by the magnetic poles of the stator, with the same polarity repelling each other and the opposite polarity attracting each other. If the direction of the current in the coil is continuously changed, then the poles of the magnetic field induced by the rotor will also continuously change, and the rotor will then keep turning under the influence of the magnetic field.
In a BLDC motor, the current-carrying conductor (stator) is fixed, while the permanent magnet (rotor) is in motion.
Cover of motion picture
Schematic diagram of BLDC motor operation
When the stator coil receives power from the mains, it becomes an electromagnet and begins to generate a uniform magnetic field in the air gap. Despite the fact that the power supply is DC, the switch produces an AC voltage waveform with a trapezoidal shape. Due to the interaction forces between the electromagnetic stator and the permanent magnet rotor, the rotor continues to rotate.
By switching the windings to high and low signals, the corresponding windings are excited to the north and south poles. The permanent magnet rotor with south and north poles is aligned with the stator poles, which causes the motor to rotate.
Moving picture cover
Operational diagram of a BLDC motor with one and two pairs of poles
Brushless DC motors are available in three configurations: single-phase, two-phase and three-phase. Of these, the three-phase BLDC is the most common type.
(3) Drive methods for brushless DC motors
The drive methods of brushless DC motors can be divided into various drive methods according to different categories, each of them having its own characteristics.
According to the drive waveform: square wave drive, this drive method is easy to implement, easy to realize the motor without position sensor control;
Sinusoidal drive: this drive method can improve the motor running effect, so that the output torque is uniform, but the implementation process is relatively complex. At the same time, this method has SPWM and SVPWM (space vector PWM) two ways, SVPWM effect is better than SPWM.
(4) Advantages and limitations of brushless DC motors
Advantages.
High output power
Small size and weight
Good heat dissipation and high efficiency
Wide range of operating speeds
Low electrical noise
High reliability and low maintenance requirements
High dynamic response
Low electromagnetic interference
Limitations.
The electronic controller required to control the motor is expensive
Requires complex drive circuitry
Requires additional position sensors (FOC not required)
(5) Applications of brushless DC motors
Brushless DC motors are used in a wide range of applications requiring a variety of loads, constant loads and positioning applications in areas such as industrial control, automotive, aerospace, automation systems, healthcare equipment, etc.
Industrial control applications
In recent years, due to the large-scale development and technological maturity of brushless DC motors, the distribution of their drive systems in industrial production has expanded and they have gradually become the mainstream of industrial motor development. Research and attempts to reduce production costs and improve operating efficiency have yielded significant benefits, and manufacturers are offering different types of motors to meet the needs of different drive systems. At this stage, brushless DC motors are used in industrial production such as textiles, metallurgy, printing, automated production lines and CNC machine tools.
Automotive sector
In addition to the core engine, motors are found in wipers, electric doors, car air conditioning, electric windows and other parts of the vehicle. As the automotive industry moves towards energy efficiency and environmental protection, the motors used must also meet the standards of high efficiency and low energy consumption. The brushless DC motor’s low noise, long life, non-sparking interference and convenient centralised control are fully in line with its advantages. With the increasing maturity of its speed regulation technology, the cost performance ratio will become higher and higher, and its application in various aspects of automotive motor drive will become more widespread.
Medical equipment field
In foreign countries, the use of brushless DC motors has been more common, can be used to drive the artificial heart in the small blood pump; in China, high-speed surgical instruments with high-speed centrifuge, thermal imaging and thermometer infrared laser modulator are used brushless DC motors.
Household appliances
The “inverter” technology has become very common, and as a symbol of Chinese home appliances gradually occupies most of the consumer market, “DC inverter” is favoured by manufacturers and has gradually replaced the “AC inverter The trend is to gradually replace the “AC inverter”. This shift is essentially the transition from induction motors to brushless DC motors and their controllers for home appliances, in order to achieve energy saving and environmental protection, low noise intelligence and high comfort requirements. The brushless DC motor is developing in the same direction as power electronics, sensors, control theory and other technologies. It is the product of a combination of technologies and its development depends on the innovation and progress of each of the technologies associated with it.
Office computer peripherals, digital consumer electronics
For example, brushless DC motors are used in the control of spindles and auxiliary movements in printers, fax machines, photocopiers, hard disk drives, floppy disk drives, cinema cameras, etc., which are commonly found in life.
03、Difference between brushless DC motors and brushed DC motors
List of structure, control and performance comparison between brushless DC motors and brushed DC motors
Difference in working principle.
Brush motors are mechanically commutated, the magnetic poles do not move and the coils rotate. The main structure of a brush motor is a stator + rotor + brushes, which obtains its rotational torque through a rotating magnetic field and thus outputs kinetic energy. The brushes are in constant contact and friction with the commutator, which conducts electricity and changes phases during the rotation.
Brushless motors take electronic commutation, the coil does not move and the magnetic poles rotate. Brushless DC motors consist of a motor body and a driver, a typical mechatronic product. The brushless motor senses the position of the magnetic poles of the permanent magnet through Hall elements. Based on this sensing, the electronic circuit is used to switch the direction of the current in the coil at the right time to ensure that the correct direction of magnetic force is generated to drive the motor.
Differences in performance.
Brushed DC motors have more mature technology, faster starting response, higher starting torque, flatter operation and higher control accuracy. Brush DC motors have a simple mechanism and are produced
Translated with www.DeepL.com/Translator (free version)