Permanent magnet synchronous motor (PMSM) must first understand two concepts, “permanent magnet” and “synchronous”. “Permanent magnet” means that the rotor of the motor is a permanent magnet, also called a permanent magnet; “synchronous” means that the frequency of the rotor and the frequency of the stator are the same, and its speed will not change due to changes in the load.
PMSM appeared in the 1950s. Its principle is the same as that of ordinary electric excitation synchronous motors, but it replaces the field winding excitation with permanent magnet excitation, which makes the motor structure simpler, reduces processing and assembly costs, and saves the troublesome Problematic collector rings and brushes improve the reliability of motor operation. Since no excitation current is required, there is no excitation loss, which improves the working efficiency of the motor.
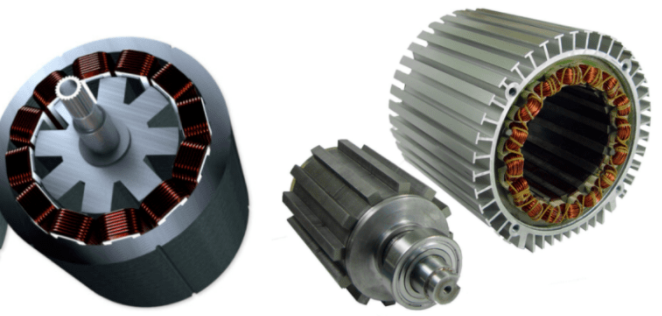
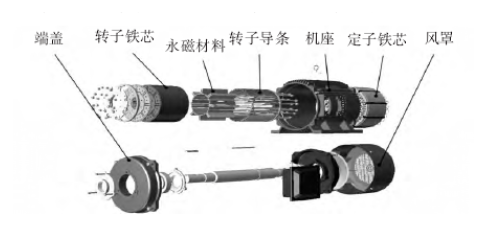
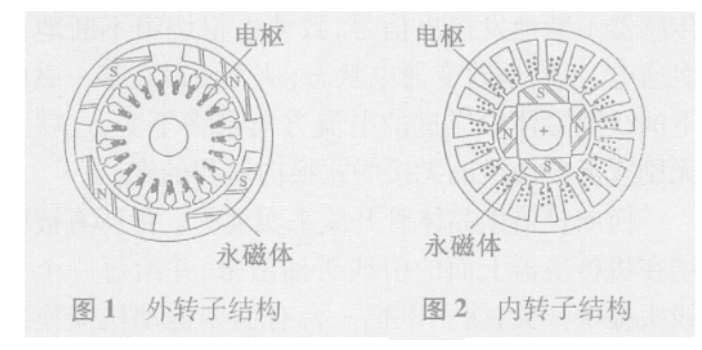
The permanent magnet synchronous motor is mainly composed of rotor, end cover and stator. The stator structure of the permanent magnet synchronous motor is very similar to the structure of the ordinary induction motor. The biggest difference between the rotor structure and the asynchronous motor is that there are high-quality permanent magnet poles on the rotor. According to the position of the permanent magnet on the rotor, Permanent magnet synchronous motors are generally divided into surface rotor structures and built-in rotor structures
The difference between the surface rotor structure and the built-in rotor structure is whether it turns inside or outside, the inside turns is a built-in rotor structure, and the outside turns is a surface rotor structure.
Generally speaking, the stator of the motor is on the outside and the rotor is on the inside. In a conventional brushed DC motor, the stator field is on the outside and the rotor armature is on the inside. After the brushless DC motor appeared, the rotating armature went from the inside to the outside, from the rotor to the stator; and the stationary permanent magnet of the stator went inside, from the stator to the rotor. This structure is called “inner rotor structure“.
In actual use, sometimes in order to meet the special technical requirements of some electronic machinery, the stator armature of the motor is made inside, and the rotor with permanent magnets is made outside. We call this structure “external rotor structure”. “, or called “inner stator structure”. Today, I will talk to you about the comparison of inner rotor and outer rotor structure motors.
The difference between the permanent magnet synchronous motor and the ordinary asynchronous motor is the rotor structure. The permanent magnet poles are installed on the rotor. The permanent magnets are arranged in various positions in the rotor. Several main forms are introduced below.
The permanent magnet rotor core still needs to be laminated with silicon steel sheets, because the permanent magnet synchronous motor is basically driven by an inverter power supply, even if the output of the inverter that generates sine waves contains high-frequency harmonics, if the whole steel is used, eddy current loss will occur .
The first form: The left figure in the figure below is a rotor with permanent magnet poles installed on the circumferential surface of the rotor core, which is called a surface-protruding permanent magnet rotor. The polarity of the magnetic poles and the direction of the magnetic flux are shown in the right figure below. This is a 4-pole rotor.
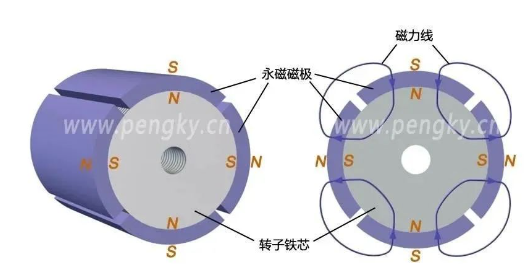
rotruding surface permanent magnet rotor
In the design of brushless DC motors, the outer rotor structure and the inner rotor structure have their own advantages and disadvantages. The difference in motor characteristics between the two designs is summarized as follows: the outer rotor structure motor has a higher rotor inertia, output torque/output power ratio, the number of parts is relatively large, and the Hall reflection position is approximate; while the inner rotor structure motor The rotor inertia, output torque/output power ratio are all low, the number of components is relatively small, and the Hall reflects the position accurately.
Moment of inertia
The ratio of load inertia to rotor inertia is one of the key elements in selecting a suitable motor. In rigid mechanical systems using gear reducers or worm gear reducers, the maximum recommended ratio of the load inertia attributed to the motor shaft to the rotor inertia is 10; for systems using belt and pulley reduction, the maximum recommended The ratio is 4.
When designing the system, as far as possible, the recommended maximum ratio of the load inertia attributed to the motor shaft to the rotor inertia should not be exceeded. In a system with a very high reduced load inertia, the use of an external rotor motor will help improve the stability of the system. However, since the acceleration torque is equal to the product of the accelerated inertia and acceleration, the inner rotor motor with small inertia can be used to obtain a higher acceleration rate for the load, and the system has high sensitivity, fast response and wide frequency band.
Another advantage of the inner rotor structure is that it is easier to achieve dynamic balance. Therefore, from the perspective of good rotor dynamic balance, the inner rotor structure is suitable for running at a high speed close to 9000 (rev/min) to 12000 (rev/min).
However, when the motor is running, there is a high-speed limit mechanically: the inner rotor structure has no special mechanical sleeve on its outer surface, and the high-speed limit is about 15,000 (rev/min); while the outer rotor structure The high-speed limit is about 30,000 (rev/min). This is a clear advantage of the outer rotor construction for very high speed operation.
Output torque
Under the premise of the same volume or mass, the external rotor motor has a higher output torque. In other words, when driving the same stirring system, the volume and weight of the inner rotor structure of the required permanent magnet motor is much larger than that of the outer rotor structure, especially the longitudinal dimension of the inner rotor is much larger than that of the outer rotor .
Running stability
The outer rotor permanent magnet volume is relatively small, especially the axial size is small, and the center of gravity is low, which ensures the stability of the stirring system.
The inner rotor permanent magnet motor has a large volume, especially a large axial dimension, a high center of gravity, and poor running stability.
Installation space
The longitudinal size of the outer rotor is relatively small, and its space suitability is wider, and it is less constrained by the installation longitudinal space.
Heat radiation
Due to the structural characteristics of the two, the heat dissipation effect of the inner rotor permanent magnet motor is usually better than that of the outer rotor permanent magnet motor. However, our products have solved this problem well through the special cooling air duct design.
Sealing performance
The inner rotor permanent magnet motor is better than the outer rotor permanent magnet motor of the usual structure. However, our products have completely solved this problem by improving the structure of the rotor and designing an independent cooling air duct, and have applied for national patents